- 设备咨询热线:
180-6877-0932 - 等离子配件咨询:











- 热线电话
180-6877-0932

- 固定电话:
0519-88370668

- 传真号码:
0519-88770167


- 公司地址:
江苏省常州市武进横林镇迎宾路129号

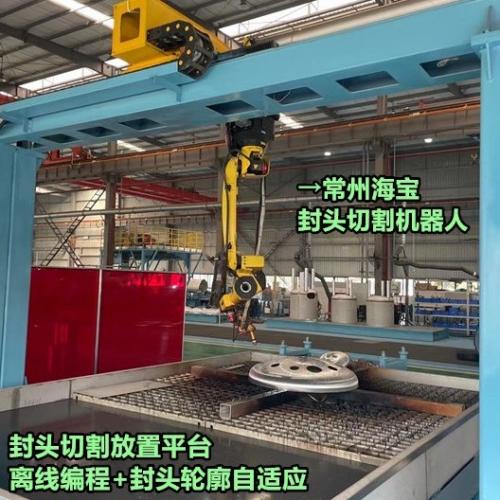
海宝封头容器切割开孔机器人
- 常州海宝压力容器封头切割机器人又称三维切割机器人,自行开发多轴数控系统,数字交流伺服闭环控制方式,参数化图库编程软件,多个开孔一次排料,连续切割可实现筒体、封头正交、偏心和斜交、偏心孔切割激光视觉在线跟踪监测示教,切割中跟踪和补偿割缝、壁厚、椭圆度、坡口角度等多种补偿功能图形显示,切割图形仿真功能,模拟显示加工过程。 该机是龙门式多轴视觉定位全自动筒体开孔和封头齐边、开孔的切割设备。适合筒体、封头上各种相贯线端头和孔的高精度、高效率一次成型切割,尤其适合多孔筒体、封头的连续定位切割,可应用在化工设备、工业和民用锅炉、压力压力容器、制药设备制造、海洋工程、造船等行业。 常州海宝压力容器...
- 技术及商务咨询:徐经理 180-6877-0932
常州海宝压力容器封头切割机器人又称三维切割机器人,自行开发多轴数控系统,数字交流伺服闭环控制方式,参数化图库编程软件,多个开孔一次排料,连续切割可实现筒体、封头正交、偏心和斜交、偏心孔切割激光视觉在线跟踪监测示教,切割中跟踪和补偿割缝、壁厚、椭圆度、坡口角度等多种补偿功能图形显示,切割图形仿真功能,模拟显示加工过程。
该机是龙门式多轴视觉定位全自动筒体开孔和封头齐边、开孔的切割设备。适合筒体、封头上各种相贯线端头和孔的高精度、高效率一次成型切割,尤其适合多孔筒体、封头的连续定位切割,可应用在化工设备、工业和民用锅炉、压力压力容器、制药设备制造、海洋工程、造船等行业。
常州海宝压力容器封头切割机器人规格参数:
型号Model | 常州海宝 压力容器封头切割机器人 常州海宝 Vessel cap cutting robot | ||
主机结构 Host structure | 龙门式双边同步驱动,直角坐标系(XYZ)+R半径轴+旋转轴(UV)+检测轴 Gantry bilateral synchronous drive, Cartesian coordinates (XYZ) + R + radius axis rotation axis (UV) + detection axis | ||
轨距 Gauge | 3000-6000mm(可定制) 3000-6000mm(Can be customized ) | 轨长 Track length | 3000-15000mm(可定制) 3000-15000mm(Can be customized) |
筒体直径 Cylinder diameter | 100-3200mm(可定制) 100-3200mm(Can be customized) | 封头直径 Vessel cap diameter | 50-4500mm(可定制) 50-4500mm(Can be customized ) |
筒体长度 Cylinder length | 3000-12000mm(可定制) 3000-12000mm(Can be customized ) | 封头高度 Vessel cap height | ≤1500mm(可定制) ≤1500mm(Can be customized ) |
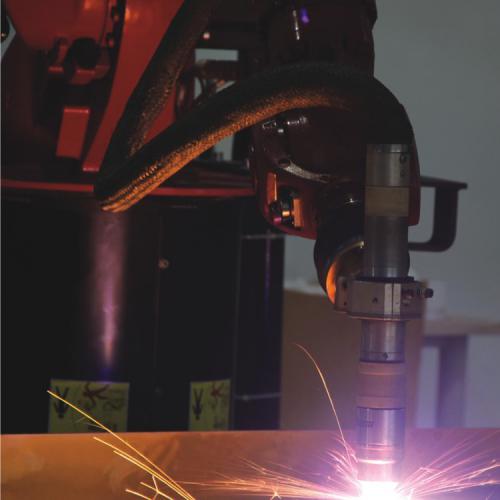
切割方式 Cutting method | 火焰/等离子可选 Flame / plasma / cutting optional | 开孔直径 Hole diameter | 30-2000mm 30-2000mm |
切割壁厚 Cutting thickness | 火焰6-50mm 等离子:根据等离子电源功率决定 Flame6-50mm Plasma cutting:According to the selected plasma power | 转动方式 Rotation mode | 行走式滚轮支架2-4组 Walking type roller bracket 2-4 groups |
坡口角度 Groove angle | 火焰/等离子坡口±45° flame±45 º,plasma±45º | 工作台 Special working platform | 可定制 Can be customized |
坡口形式 Groove form | I、V、X、K | 切割速度 Cutting speed | 50-6000mm/min(可设定) 50-6000mm/min(Can be customized ) |
编程方式 Programming mode | 系统图库参数化编程软件 Gallery parametric programming software system | 空程速度 Max travel speed | ≤12000mm/min(可设定) ≤12000mm/min(Can be customized ) |
长度定位精度 Length positioning accuracy | 0.3mm/2000mm | 角度定位精度 Angle positioning accuracy | 0.1-0.2°/360° 0.1-0.2º/360º |